
MOEURN DEAR
Research Assistant Professor at University of Yamanashi


I am familiar with the following technical areas:
- Robotic Manipulator Motion Planning
- Autonomous Mobile Robot Navigation
- ROS 2 (Robot Operating System)
- Computer Vision and Image Processing
- Deep Learning and Neural Networks
- NVIDIA Jetson Platform Deployment
- Robotic System Integration
- Deep Learning-based Perception Systems
- Autonomous Robotic Applications
Hand-Eye Calibration for Robotic Grasping with UR5e
Developed hand-eye calibration system for 6DOF UR5e manipulator for precise grasping tasks. Designed and fabricated custom end-effector, implemented motion planning for trajectory control and visual servoing. Integrated perception pipeline with state-of-the-art object tracking models for robust object detection and tracking. System operated using ROS2 framework for real-time robot control.
Enhanced EdgeTAM for Object Tracking
Improved memory bank architecture of EdgeTAM for enhanced object tracking performance. Integrated with SAMURAI and other state-of-the-art tracking frameworks to achieve robust real-time object tracking capabilities for robotic perception systems.
Fanuc CRX-5iA Grasping with Hand-Eye Calibration
Implemented hand-eye calibration system for Fanuc CRX-5iA manipulator to perform precise grasping tasks. Developed complete vision-guided manipulation pipeline integrating ROS2 control with real-time perception for accurate object localization and grasp execution.
Fanuc CRX-5iA ROS2 Driver Development
Developed comprehensive ROS2 driver for Fanuc CRX-5iA robotic manipulator to enable full ROS2 integration. Created hardware interface layer for seamless communication between ROS2 control stack and Fanuc robot controller. Implemented motion planning integration, trajectory execution, and real-time control capabilities for autonomous robotic applications.
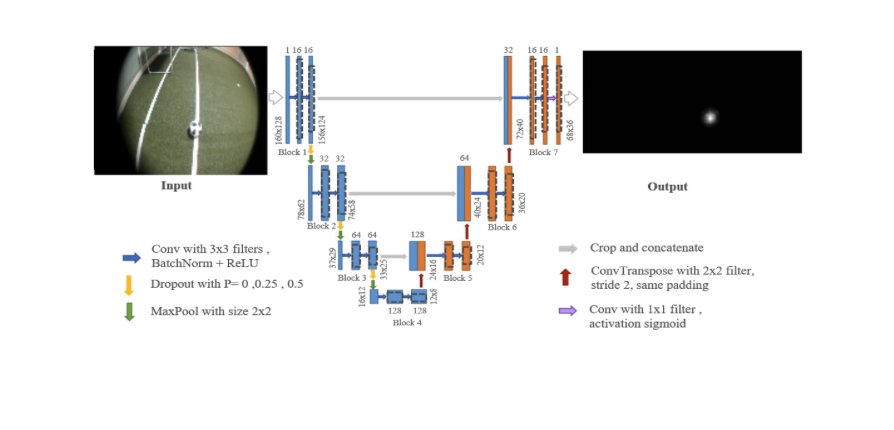
Deep Learning Model for Ball Localization
Built custom deep learning architecture from scratch for real-time ball detection and localization. Implemented complete training pipeline with data augmentation and validation, achieving high accuracy ball tracking for robotic applications.
Indoor Obstacle Detection with YOLOv7 for Mobile Robot
Trained YOLOv7 model for robust indoor obstacle detection and collected annotated dataset for diverse indoor environments. Integrated obstacle avoidance system with mobile robot navigation stack and deployed real-time inference for autonomous navigation.
Patent
Automated Berry Thinning System with 7DOF Manipulator
Building a complete end-to-end automated berry thinning system using a 7DOF manipulator. Developed ROS2 driver for Fanuc CRX-5iA robotic arm, implemented motion planning algorithms for inverse kinematics and trajectory optimization, designed custom end-effector mechanism for berry removal, and integrated computer vision with deep learning for target detection.
No publications available yet.
Research in progress - publications coming soon!
I'm an enthusiastic lifelong learner, always eager to expand my knowledge and skills. I believe continuous learning is essential in the rapidly evolving fields of AI and robotics. I'm committed to taking more courses in the future and look forward to joining new learning opportunities that will help me grow professionally.
Below are some courses and certificates I've taken and plan to study in the future:
- Exploring new places around the world
- Capturing vintage moments with my Fujifilm camera
- Snowboarding and outdoor adventures