背景と目的
作物の重量とサイズは、その商業的価値を決定する重要な要素である。しかし、これらのパラメータを手動で測定することは、労力がかかり時間もかかる。この研究は、パックされたコンテナ内のコンニャクのサイズと重量を単一のRGB画像を使用して推定する機械ビジョンベースの技術を開発することを目的とし、手動測定の制限と、パック条件下でのオクルージョンによる課題に対処したものである。
方法
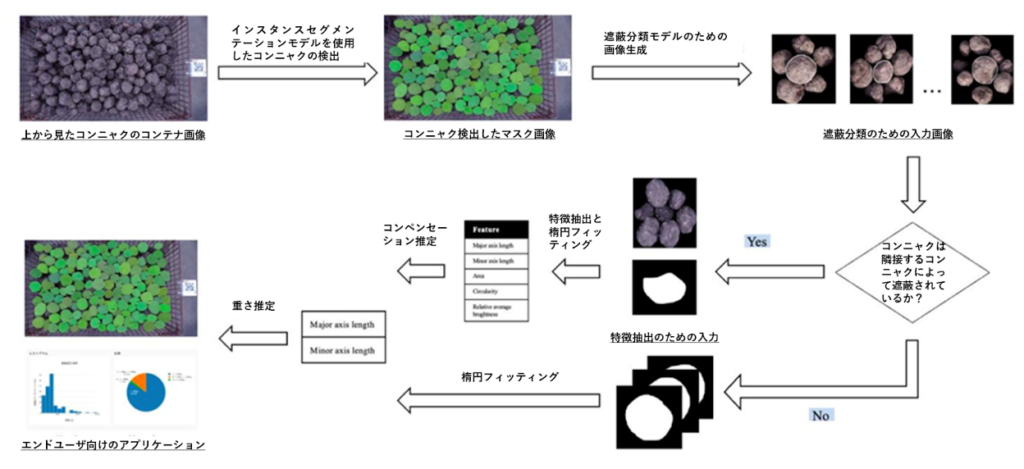
我々は、他のコンニャクに覆われている場合でも、正確にコンニャクを検出および測定するためにDNNを使用する新しい方法を提案する。この方法は、周囲のコンニャクの特徴を利用してオクルージョンされたコンニャクを識別し、その真の寸法を推定する機械学習モデルを開発するものである。この方法には、CNNを使用したインスタンスセグメンテーション、楕円フィッティングによる寸法推定、バイナリ分類モデルを用いたオクルージョン識別、および回帰モデルを用いた重量推定が含まれる。
結果
実験結果は、従来の方法と比較して測定誤差が大幅に減少したことを示し、このアプローチの有効性を強調するものである。この方法は、オクルージョンされたコンニャクの識別と寸法推定において高い精度を達成し、重量推定の精度を向上させる。システムの堅牢性と精度は、プロの農家による推定を上回るフィールド実験で検証された。
発表文献
- Kabin Yok-In, Prawit Buayai, Xiaoyang Mao, “Size and weight estimation of Konjac with occlusion classification and deep learning,” Measurement, ELSEVIER, Vol.253, pp.117926, Article 117926, 2025-5, https://doi.org/10.1016/j.measurement.2025.117926.