房づくり用直交座標ロボット
研究支援:
生物系特定産業技術研究支援センター
戦略的スマート農業技術等の開発・改良「AI駆動型栽培体系:人間とロボットの協働によるシャインマスカット栽培の高効率・高品質化」(2022–2024年度)
ブドウの生産において、房づくりをすることで養分競合の抑制や病気発生の低減が可能である。これにより、高品質な果実を生産することができるため、ブドウを生産において必要不可欠な作業である。一方、この作業ができる期間は限られており、短期間に集中的な作業が求められることから、生産者に大きな負担がかかっている。そのため、房づくり作業の自動化が強く求められている。
これらの課題に対して、本研究ではブドウ栽培向けの房づくり用直交座標ロボットを開発する。本システムは、AIによる認識とロボットプラットフォームを統合し、当研究室で独自設計した房づくり特化のエンドエフェクタを搭載している。

従来の研究では、コンピュータビジョンや拡張現実(AR)を用いて作業者を支援する手法が主流であった。それに対して、本研究では作業の完全自動化を目的としている。提案するAIモデルは、房の形状に依存することなく花穂軸を高精度に検出し、花穂長を推定可能である。実験結果から花穂軸長の推定精度97.7%を達成し、ロボットによる安定した整形作業を実現している。

AIによる推定結果に基づき、ロボットは花穂の長さを目標とする長さに自動的に切断する。本システムは、高品質な果実の安定生産を維持しながら、作業時間を約25%削減することを目指しており、生産者の作業負担軽減と熟練作業への依存低減に貢献する。
自律移動型房づくりロボット
研究支援:
生物系特定産業技術研究支援センター
次世代スマート農業技術の開発・改良・実用化「多機能ロボット開発と栽培体系革新によるシャインマスカット高効率栽培の実現」(2024–2026年度)
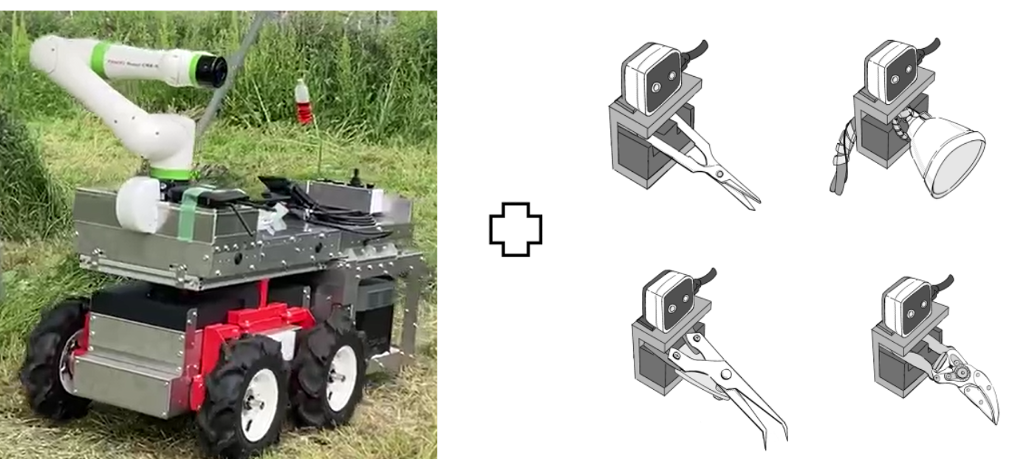
本研究室では、ブドウ栽培における房づくりを対象とした自律移動型ロボットの開発も進めている。本システムは Robot Operating System(ROS2)を基盤とし、FANUC製協働ロボットアーム(CRX-5iA)、REACT移動プラットフォーム、研究室独自設計のエンドエフェクタ、およびAIソフトウェアモジュールを統合制御する。ロボットはブドウ園内を自律走行し、人の介入なしに房づくり作業を実行することで、新たなシャインマスカット栽培体系の基盤構築を目指している。ロボットには、房づくりに特化したエンドエフェクタが搭載されており、AIによる推定結果に基づいて花穂を高精度に切断することが可能である。
本研究では、従来の整形方法に加えて、上部枝梗を利用した手法を導入している。この手法では、花穂上部の枝2本(長さ約4.0~4.5cm) のみを残し、下部を切除する。1回目のジベレリン(GA)処理後、残した2本のうち1本を選択して収穫期まで育てる。この方法により、房づくり作業時間を約60%削減できることが示されている。
自律動作においては、AIによる認識技術を用いて、残すべき上部2本の枝を検出し、その結果に基づいて専用カッターで切断を行う。これにより、生産者の経験に基づく房づくり戦略をロボットによって効率的かつ安定的に実行することが可能になる。

自律移動、AIによる認識、作業特化型エンドエフェクタを組み合わせることで、本システムは果実品質を維持しつつ、作業時間を約25%削減することを目標としている。本研究では、作業期間が限られる栽培行程において、生産者を支援し、ブドウ生産における熟練技能に依存した作業の自動化に貢献することを目指す。