Cartesian Robot for Inflorescence Trimming
Sponsored by:
生物系特定産業技術研究支援センター
戦略的スマート農業技術等の開発・改良「AI駆動型栽培体系:人間とロボットの協働によるシャインマスカット栽培の高効率・高品質化」(2022–2024年度)
In table grape production, inflorescence trimming is a critical process for producing high-quality fruit by reducing nutrient competition and suppressing disease occurrence. However, this task must be performed within a limited time window, placing a significant workload on farmers. As a result, automation of inflorescence trimming is strongly demanded.
To address this challenge, we are developing a Cartesian-type inflorescence trimming robot for grape cultivation. The system integrates AI-based perception and a robotic platform, with a custom end effector designed by our laboratory specifically for flower trimming.

Unlike previous approaches that assisted workers using computer vision and augmented reality, our method focuses on fully automating the task. The proposed AI model accurately detects the inflorescence axis and estimates inflorescence length regardless of cluster shape, overcoming limitations of shape-dependent estimation methods. Experimental results show that the system achieves a flower axis length estimation accuracy of 97.7%, enabling reliable robotic trimming.

Based on the AI estimation results, the robot automatically trims the inflorescence to the desired length. This system aims to reduce working time by approximately 25% while maintaining stable, high-quality grape production, supporting growers, and reducing reliance on skilled manual labor.
Autonomous Inflorescence Trimming Robot
Sponsored by:
生物系特定産業技術研究支援センター
次世代スマート農業技術の開発・改良・実用化「多機能ロボット開発と栽培体系革新によるシャインマスカット高効率栽培の実現」(2024–2026年度)
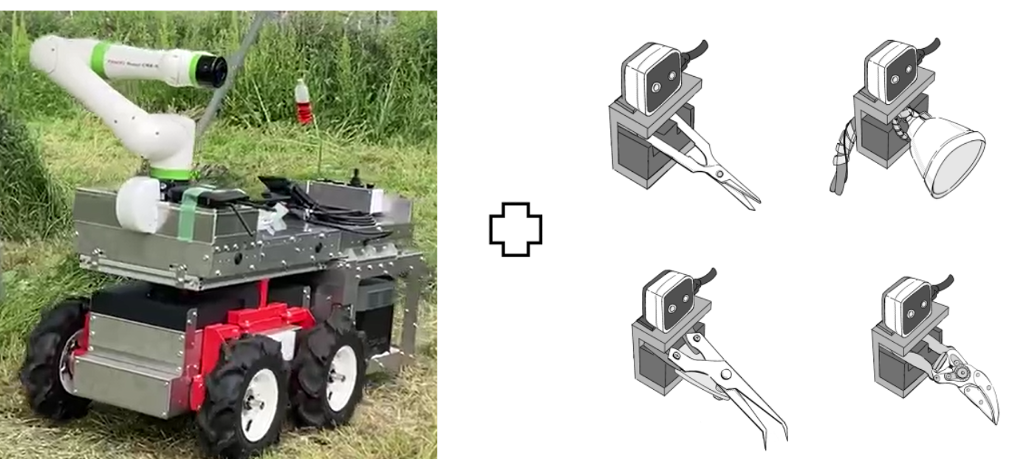
We are developing an autonomous mobile robot for inflorescence trimming in grape cultivation. The system uses Robot Operating System (ROS2) to coordinate a FANUC CRX5ia robotic arm, REACT mobile platform, laboratory-designed end effector, and AI software module. The robot navigates vineyards autonomously and performs inflorescence trimming without manual intervention, forming the foundation of a new Shine Muscat cultivation framework. The robot is equipped with an end effector specially designed by our laboratory for inflorescence trimming. Based on AI-driven estimation results, the end effector enables precise cutting of flower clusters, allowing the robot to perform inflorescence trimming autonomously.
In addition to conventional trimming methods, this research employs a farmer-informed inflorescence trimming strategy designed to reduce operation time significantly. In this approach, only the upper two lateral branches of the inflorescence, with a length of approximately 4.0–4.5 cm, are retained, while the lower portion of the inflorescence is trimmed. After the first gibberellin (GA) treatment, one of the two remaining lateral branches is selected and retained for growth until harvest. Using this method, the inflorescence trimming process time can be reduced by approximately 60%.
For autonomous operation, the robot uses AI-based perception to detect the two upper lateral branches to be maintained. Based on the detection results, the robot performs trimming by cutting the inflorescence from below the upper lateral branches using a dedicated cutter integrated into the end effector. This enables efficient and consistent implementation of the farmer-inspired trimming strategy through robotic automation.

By combining autonomous mobility, AI-based perception, and a task-specific end effector, the system aims to reduce working time by approximately 25% while maintaining high fruit quality. This approach supports growers during time-sensitive cultivation periods and contributes to the automation of skill-intensive tasks in grape production.