摘粒は、 シャインマスカットなどの高品質なブドウを生産するために欠かせない作業行程である。花房や果粒の適切な管理は、果実の外観やサイズ、品質全体に大きく影響する。従来、房づくりや摘粒などの作業や収穫時期の判断などは、熟練栽培者の経験に大きく依存してきた。しかし、農業従事者の高齢化と労働力不足により、技術継承の困難さと作業負担の拡大が課題となっている。
AIを活用したブドウ栽培のためのロボット
研究支援:
生物系特定産業技術研究支援センター
戦略的スマート農業技術等の開発・改良「AI駆動型栽培体系:人間とロボットの協働によるシャインマスカット栽培の高効率・高品質化」(2022–2024年度)
ブドウ栽培における技術継承と労働力不足の課題に対して、当研究室ではロボットをベースとしたAI駆動型栽培支援システムを開発しており、効率的に高品質なブドウの生産ができることを目指している。
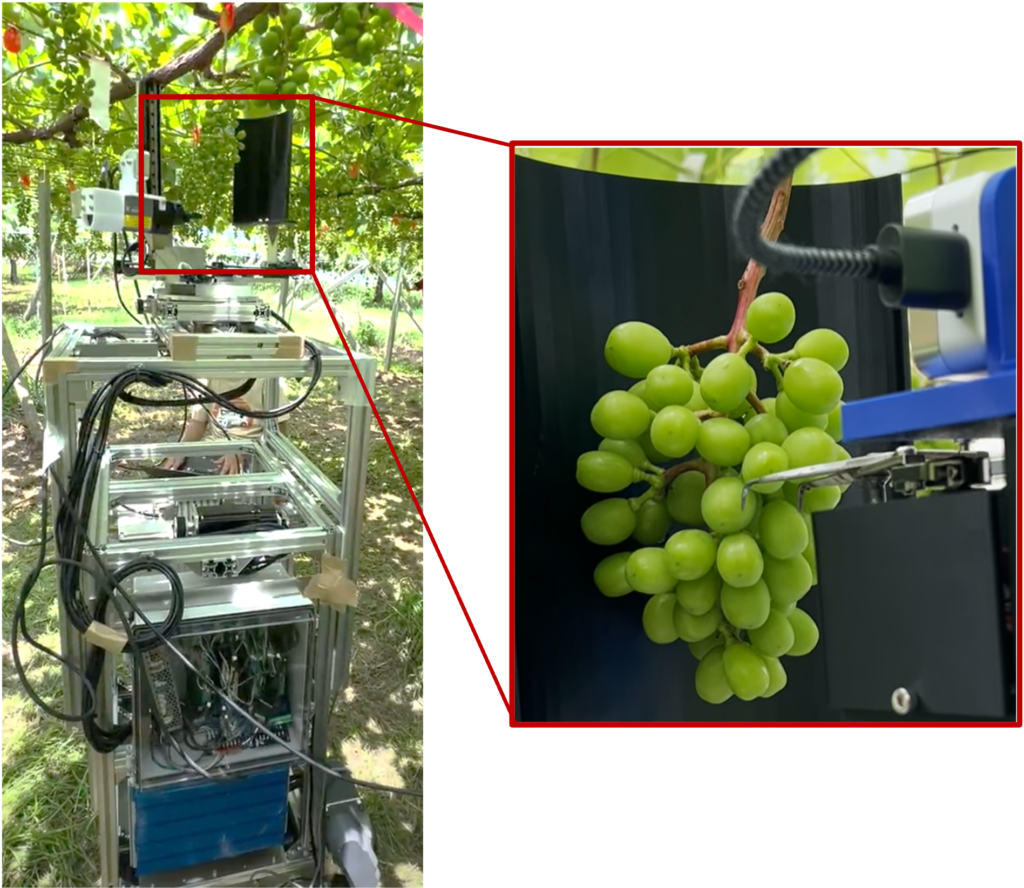
私たちは、果房保持機構、摘粒用小型カッター、摘粒評価用の回転カメラを搭載した自律移動型ロボットのプロトタイプを開発した。従来の農業用ロボットは収穫や運搬に重きをおいていたが、本システムでは、屋根式棚栽培下におけるブドウの生産に必要不可欠である果粒レベルでの管理を可能にする。
このロボットは、熟練作業者と比較して、摘粒と房づくりの作業速度は遅いものとなるが、精度と再現性を優先している。熟練者の技術や知識をAI駆動の動作に組み込むことで、システムは経験の浅い作業者を支援すると同時に、人の判断を完全に置き換えることなく、部分的な自動化を実現する。
自律移動型栽培支援ロボット
研究支援:
生物系特定産業技術研究支援センター
次世代スマート農業技術の開発・改良・実用化「多機能ロボット開発と栽培体系革新によるシャインマスカット高効率栽培の実現」(2024–2026年度)
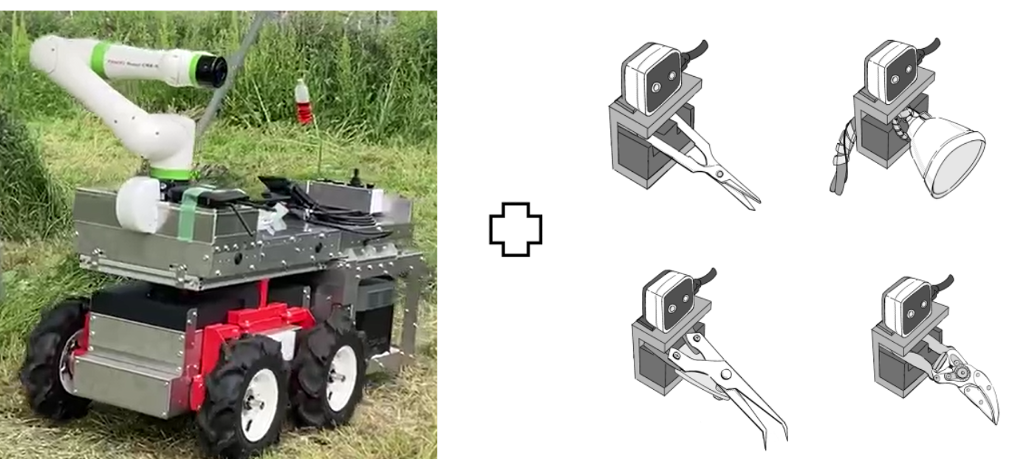
本研究では、ブドウ栽培向けの自立移動型ロボットの開発を進めている。本システムは、Robot Operating System (ROS2)を基盤として、FANUC製ロボットアーム (CRX-5iA)、REACT移動プラットフォーム、当研究室で独自設計したエンドエフェクタ、およびAIソフトウェアモジュールを統合制御する。ロボットはブドウ園内を自律走行し、人的介入なしに摘粒作業を実行することで、新たなシャインマスカット栽培体系の基盤構築を目指している。本システムは、摘粒対象果粒の識別精度95%、アプローチ精度はほぼ100%を達成している。
本システムでは、事前にブドウ園のマップを登録し、目に見える果房もしくは隠れている果房の位置情報をあらかじめ記録する。これに基づき、ロボットは自動的に経路設計を行い、果房を一房ずつ順番に摘粒する。ロボットが摘粒対象の果房付近まで到達すると、ロボットは停止し摘粒作業を開始する。ロボットアームに搭載されたエンドエフェクタには2台の深度カメラが組み込まれており、1台は最も近い果房の検出に、もう1台は摘粒作業の誘導に用いられる、FANUCアームは、経路設計機能により対象果房へ近づく。さらに、専用設計のカバーによって果房を中央に誘導・保持し、摘粒中の後方移動や揺れを防ぐ。
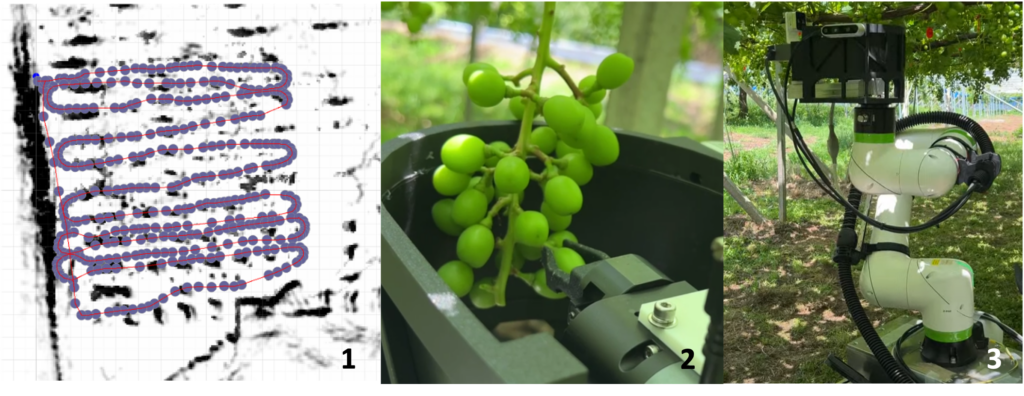
ロボットアームは、摘粒前にエンドエフェクタを360度回転させて果房をスキャンする。その後、複数の角度から摘粒を行う。この角度は栽培条件に応じて設定可能である。摘粒作業時間は1房あたり約5分程を要する。摘粒作業が完了したら、ロボットは次の対象果房へ自律移動する。
本研究ではロボットによる作業支援を通じて、果実の品質を維持しながら、従来の作業時間を約40%削減可能な栽培システムの確率を目的としている。自律動作により、労働的負担をけいげんし、精度を損なうことなく作業効率を向上させるとともに、AIによる作業を通して生産者を支援する。
発表文献
- P. Buayai, Y. S. Tan, M. F. B. Kamarudzaman, K. Makino, H. Nishizaki and X. Mao, “Automating Grape Thinning: Predicting Robotic Arm End-effector Positions Using Depth Sensing Technology and Neural Networks,” 2023 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Pisa, Italy, 2023, pp. 76-80, doi: 10.1109/MetroAgriFor58484.2023.10424399
特許
摘粒案件
特許第7090255号(特願2022-3201)、2022年1月12日出願、【発明の名称】情報処理装置、システム、プログラム、及び情報処理方法、茅 暁陽、 ブアヤイ プラウィット、横澤 浩樹、根本 陽平