Berry thinning is an essential cultivation process for producing high-quality table grapes such as Shine Muscat. Proper management of flower clusters and berries directly affects fruit appearance, size, and overall quality. Traditionally, tasks such as cluster shaping, berry thinning, and harvest timing rely heavily on the experience of skilled growers. However, aging farmers and labor shortages have made the transfer of these skills and the reduction of physical workload an urgent challenge.
Cartesian Robot for AI-Driven Grape Cultivation
Sponsored by:
生物系特定産業技術研究支援センター
戦略的スマート農業技術等の開発・改良「AI駆動型栽培体系:人間とロボットの協働によるシャインマスカット栽培の高効率・高品質化」(2022–2024年度)
To address labor shortages and skill dependency in grape cultivation, our laboratory is developing an AI-driven cultivation support system based on a Cartesian robot, enabling efficient and high-quality grape production through human–robot collaboration.
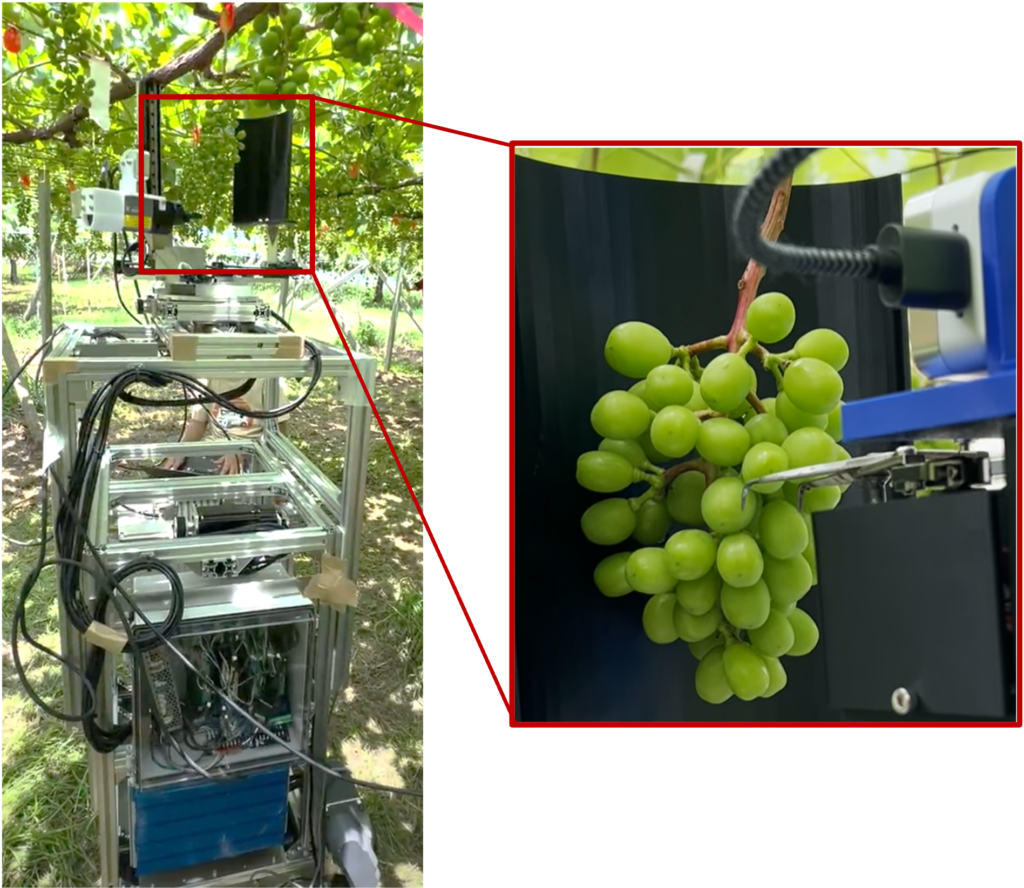
We developed a prototype autonomous mobile Cartesian robot equipped with a berry cluster holding mechanism, a compact cutter for berry thinning, and a rotating camera for thinning evaluation. Unlike conventional agricultural robots focused on harvesting or transport, this system enables berry-level management, which is essential for premium Japanese table grape production under roof-style trellis systems.
The robot performs berry thinning and cluster shaping at a slower speed than skilled workers, prioritizing precision and repeatability. By embedding expert knowledge into AI-driven operations, the system supports inexperienced workers while enabling partial automation without replacing human decision-making.
Autonomous Mobile Cultivation Support Robot
Sponsored by:
生物系特定産業技術研究支援センター
次世代スマート農業技術の開発・改良・実用化「多機能ロボット開発と栽培体系革新によるシャインマスカット高効率栽培の実現」(2024–2026年度)
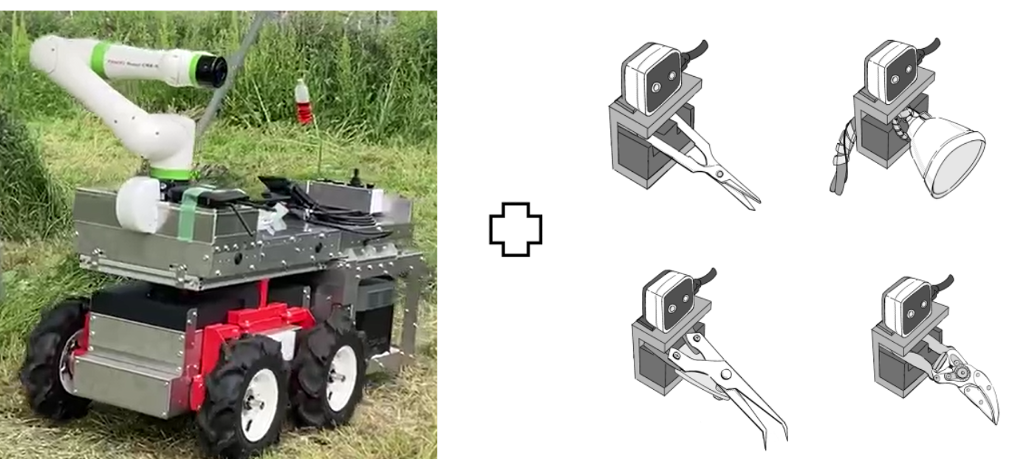
We are developing an autonomous mobile robot for grape cultivation. The system uses Robot Operating System (ROS2) to coordinate a FANUC CRX5ia robotic arm, REACT mobile platform, laboratory-designed end effector, and AI software module. The robot navigates vineyards autonomously and performs berry thinning without manual intervention, forming the foundation of a new Shine Muscat cultivation framework. The system achieves a berry thinning target identification accuracy of 95% and an approach accuracy of nearly 100%.
In this system, a vineyard map is pre-registered, and the locations of visible or potential grape bunches are recorded in advance. Based on this map, the robot automatically plans its path and performs berry thinning sequentially, one grape bunch at a time. When the mobile robot navigates close to the target grape bunch for thinning, it stops and initiates the thinning process. The end effector mounted on the robotic arm incorporates two depth cameras: one for detecting the nearest grape bunch and another for guiding the berry thinning process. The FANUC arm then approaches the target bunch using its path planning system. A specially designed cover guides the bunch into a centered position, stabilizes it, and provides rear support to prevent backward movement or shaking during thinning.
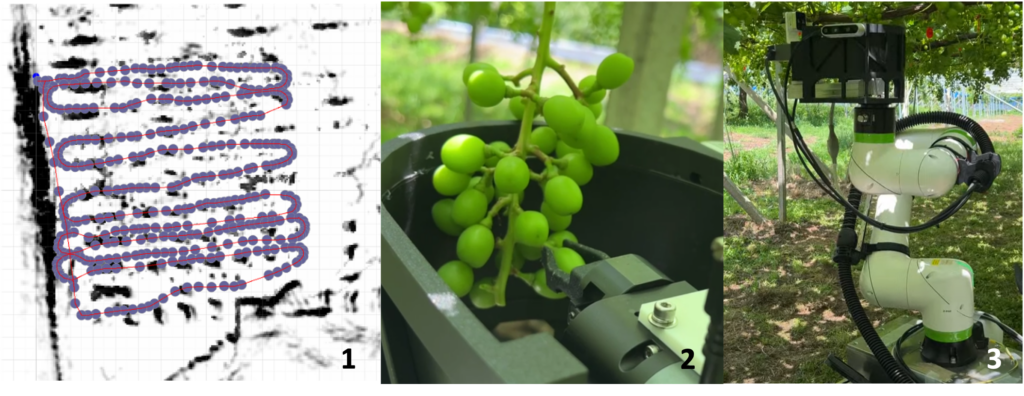
Before thinning, the robot arm rotates the end-effector 360 degrees to scan the bunch. Berry thinning is then performed at multiple angles, with the number of angles configurable depending on cultivation requirements. Each thinning operation takes approximately five minutes, after which the robot moves autonomously to the next target berry.
Through robotic assistance, this research aims to establish a cultivation system that can reduce conventional working time by approximately 40% while maintaining high fruit quality. Autonomous operation reduces labor intensity, improves work efficiency without sacrificing precision, and supports growers through AI-driven task execution.
Publication
- P. Buayai, Y. S. Tan, M. F. B. Kamarudzaman, K. Makino, H. Nishizaki and X. Mao, “Automating Grape Thinning: Predicting Robotic Arm End-effector Positions Using Depth Sensing Technology and Neural Networks,” 2023 IEEE International Workshop on Metrology for Agriculture and Forestry (MetroAgriFor), Pisa, Italy, 2023, pp. 76-80, doi: 10.1109/MetroAgriFor58484.2023.10424399
Patent
摘粒案件
特許第7090255号(特願2022-3201)、2022年1月12日出願、【発明の名称】情報処理装置、システム、プログラム、及び情報処理方法、茅 暁陽、 ブアヤイ プラウィット、横澤 浩樹、根本 陽平